
This is a ultrasonic radar device made using Arduino uno and ultrasonic sensor that also shows the distance of the obstacle in CENTIMETERS. And shows the radar in yyour computer/laptop/mobile..
WORKING PROCEDURE
The ultrasonic sensor sends pings that returns us the time traveled by the signal in microseconds. From there we convert that time to distance as we know the speed of sound is 343 meters/seconds .
For this project i have programmed the micro controller such that when
any object is situated at a distance more than 40 cm the GREEN LED will turn on , and at a distance less than 40 cm the RED LED will
start blinking.
Keep in Mind:
- It might get congested, so for practicing it is better to use multiple breadboards
- A capacitor of 470UF should be used to solve the jittering of the servo motor
-
Resistors of at least 100 Ohms must be placed in series with the
LEDs to avoid any damage to the LEDs.
THE COMPONENTS
- ARDUINO UNO BOARD
- LED:--> RED-GREEN [ according to your wish ]
-
RESISTOR 100 Ohms - X2
- 6-9 Volts DC SOURCE / BATTERY
-
ULTRASONIC SENSOR (HCSR-04)
- BUZZER
- BREAD BOARD
- SERVO MOTOR
- JUMPER WIRES ( M-M | M-F )
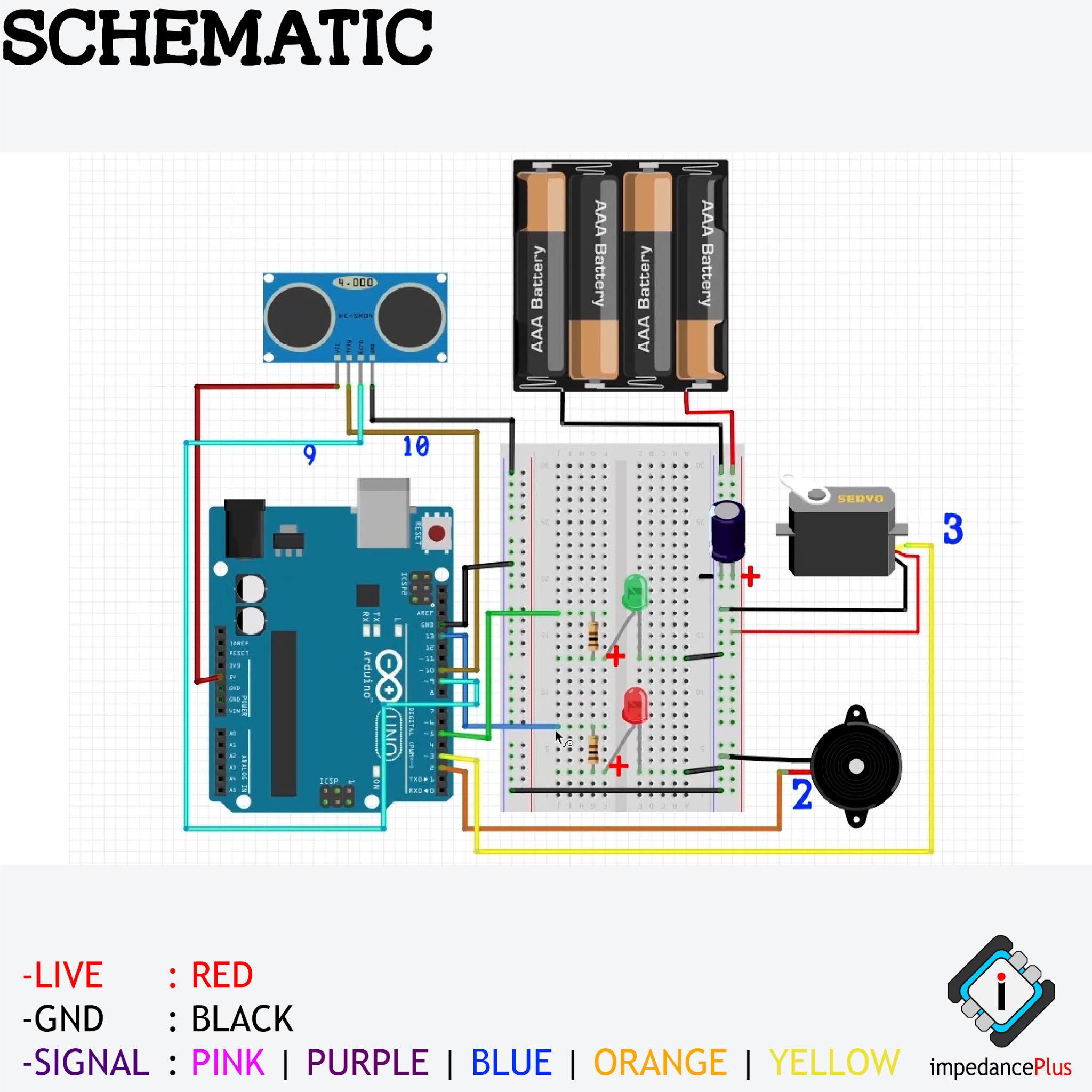
SCHEMATIC


THE COMPLETE CODE - ARDUINO IDE

/* author- sadman alvee
* Owner/Founder @ impedancePlus
*/
#include <Servo.h>
// ULTRASONIC SENSOR PINS
int trigPin = 10;
int echoPin = 9;
long signalTravelTime;
int distance;
// SERVO PINS
int servoPin = 3;
// LED-BUZZER PINS
int greenLedPin = 5;
int redLedPin = 13;
int buzzerPin = 2;
// Create objects of type -Servo
Servo thisServo;
void _configureSignalSystem() {
//40 cms
if (distance <= 40) {
digitalWrite(greenLedPin, LOW);
digitalWrite(redLedPin, HIGH);
digitalWrite(buzzerPin, HIGH);
delay(20);
digitalWrite(redLedPin, LOW);
digitalWrite(buzzerPin, LOW);
delay(20);
}
else if (distance > 40) {
digitalWrite(greenLedPin, HIGH);
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int _configureUltrasonicSensor() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
signalTravelTime = pulseIn(echoPin, HIGH); //returns the sound wave travel time in microseconds
distance = signalTravelTime * 0.034 / 2; // in centimeters
return distance;
}
void _configureArduinoAndProcessingIDE(int j, int distanceFinal) {
Serial.print(j); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distanceFinal); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
void _configureServoMotor() {
for (int i = 15; i <= 165; i++) {
thisServo.write(i);
delay(10);
distance = _configureUltrasonicSensor();
_configureArduinoAndProcessingIDE(i, distance);
_configureSignalSystem();
}
// Repeats the previous lines from 165 to 15 degrees
for (int i = 165; i >= 15; i--) {
thisServo.write(i);
delay(10);
distance = _configureUltrasonicSensor();
_configureArduinoAndProcessingIDE(i, distance);
_configureSignalSystem();
}
}
void setup() {
// put your setup code here, to run once:
//Set-up Ultrasonic Sensors
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(greenLedPin, OUTPUT);
pinMode(redLedPin, OUTPUT);
pinMode(buzzerPin, OUTPUT);
//Set-up Servo pins
thisServo.attach(servoPin); // Defines on which pin is the servo motor attached
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
// rotates the servo motor from 15 to 165 degrees
_configureServoMotor();
}
THE COMPLETE CODE - PROCESSING IDE
/* author- sadman alvee
* Owner/Founder @ impedancePlus
*/
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1180, 680); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this,"COM3", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
}
void draw() {
fill(98,245,31);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40 according="" and="" angle="" coordinats="" cos="" distance="" drawline="" draws="" drawtext="" height-height="" iangle="" idistance="" if="" line="" location="" moves="" new="" object="" on="" pixsdistance="" popmatrix="" pushmatrix="" radians="" screen="" sin="" starting="" stroke="" strokeweight="" texts="" the="" to="" translate="" void="" width-width="" width="">40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(20);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text("impedancePlus", width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40 cm="" cos="" fill="" height-height="" idistance="" popmatrix="" radians="" resetmatrix="" rotate="" sin="" text="" textsize="" translate="" width-width="" width="">
Comments
Post a Comment